我国应用环境把机器人分为两类:工业机器人和特种机器人。国际上的机器人学者,从应用环境出发将机器人也分为两类:制造环境下的工业机器人和非制造环境下的服务与仿人型机器人。
所谓工业机器人就是面向工业领域的多关节机械手或多自由度机器人。如机械手。而特种机器人则是除工业机器人之外的、用于非制造业并服务于人类的各种先进机器人。包括服务机器人、水下机器人、微操作机器人、娱乐机器人、军用机器人、农业机器人、机器人化机器等。
工业机器人应用
工业机器人的含义:工业机器人是能模仿人体某些器官的功能(主要是动作功能)、有独立的控制系统、可以改变工作程序和编程的多用途自动操作装置。
工业机器人在工业生产中能代替人做些单调、频繁和重复的长时间作业,或是危险、恶劣环境下的作业,例如在冲压、压力铸造、热处理、焊接、涂装、塑料制品成形、机械加工和简单装配等工序上,以及在原子能工业等部门中,完成对人体有害物料的搬运或工艺操作。
工业机器人的组成
组成部分关系图
执行机构——执行机构可以抓起工件,并按规定的运动的速度、运动的轨迹把工件送到指定位置处,放下工件。通常执行机构有以下几个部分:
1.手部。手部是工业机器用来握持工件或工具的接触。有些工业机器人直接将工具(如电焊枪、油漆喷枪、容器等)固定在手部,它就不再另外安装手部了。
2.腕部。腕部是将手臂连接在一起的部件。它的作用是调整手部的方位和姿态,并可扩大臂部的活动范围。
3.臂部。臂部支承着腕部和手部,使手部活动的范围扩大。无论是手部、腕部或是臂部都有许多轴孔,孔内有轴、轴和也之间形成一个关节,机器人有一个关节就有了一个自由度。
机械本体
1.机械本体的作用用来支承手部、腕部和臂部,驱动装置及其他装置也固定在机械本体上。
2.行走机构对用可以行走的工业机器人,它的机械本体是可以移动的,否则机械本体直接固定在基座上。行走机构用来移动工业机器人。有的行走机构是模仿人的双腿,有的只不过是轨道和车轮机构而已。
3.驱动系统是装在机械本体内,执行机构的作用是向执行元件提供动力。根据不同动力源,驱动系统的传动方式也分为液压式、气动式、电动式和机械式四种。
控制系统
1. 控制系统的作用。控制系统是工业机器人的指挥中心。他控制工业机器人按规定的程序动作。控制系统还可存储种指令(如动作顺序、运动轨迹、运动速度以及动作的时间节奏等),同时还向各个执行元件发出指令。必要时,控制系统汉对自己的行为加以监视,一旦有越轨的行为,能自己排查故障发生的原因并及时发出报警信号。
2.人工智能系统。是赋予工业机器人五种感觉功能,以实现机器人对工件的自动识别和适应性操作。具有自适应性的智能化机械系统也是当前机电一体化技术的发展方向,模糊计算机的应用虽然处于这一步的初级阶段,但真正具有适应性的智能化系统必将总这里突破。
检测系统
主要用于检测自己的执行系统所处的位置、姿势,并将这些情况及时反馈给控制系统,控制系统根据这个反馈信息在发出调整动作的信号,使执行机构进一步动作,从而使执行系统一定的精度到达规定的位置和姿势。
工业机器人的特点——通用性、柔软性、自动性、准确性。
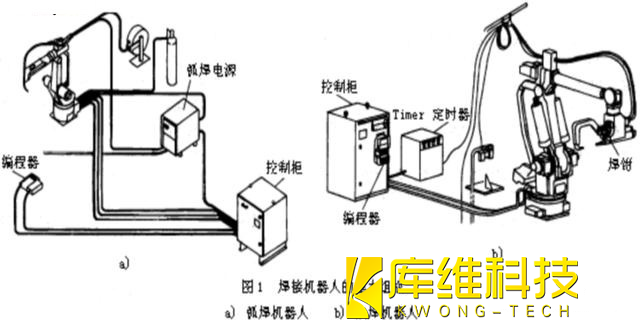
工业机器人主要种类——焊接机器人、喷漆机器人、装配机器人、采矿机器人、搬运机器人、食品工业机器人。